谈高速服务区停车诱导技术难点
- 作者:凡德
- 文章来源:凡德
一、室外停车诱导的技术选项有限
【传统室内停车诱导】
目前行业内做室内停车诱导的厂家比较多,而且技术相对来说比较成熟,比如采用超声波检测、摄像头检测等手段,技术选项很多。
【传统室外停车诱导】
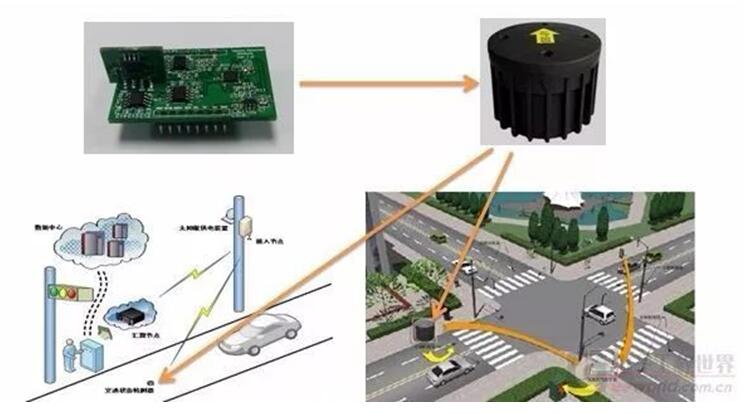
室外停车诱导技术选项不多,传统的模式是使用地磁传感器。
但是,在高速服务区停车场这个特殊的场景下的停车检测方面,使用地磁传感器有诸多缺陷:最显著地问题就是容易磁饱和,导致整个系统停摆。
二、传统的地磁停车诱导方案遇到了高速服务区的环境的极大挑战
因地磁技术技术先天缺陷,在高速公路服务区停车检测中,难以达到客户对产品的期待,出现检测不准或者连续工作一周就出现磁饱和的罢工情况,难以满足要求。
分析如下:
1、超长大车的检测
和城市内的停车检测不同的是,高速公路服务区也是大货车、超长车辆司机停车的休息区,不同车辆不同高度的地盘,甚至拖挂车等,无法有效预计和控制磁通量等指标,对地磁的感应能力提出了极高的要求。

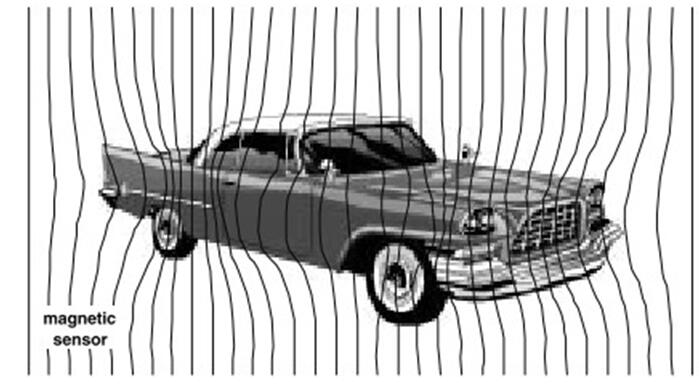
2、高速行驶车辆的干扰
因为高速公路服务区停车场紧靠告诉公路,高速公路快速、大量车辆的通行,可能会对紧挨的停车位产生持续的、不可预知的磁场扰动,该效应不断累积,使得服务区停车位下的地磁传感器无法有效工作。在实际的使用中,高速公路服务区停车位地磁传感器难以准确对车位上的车辆进行检测。
3、“非”字形和斜列式停车干扰
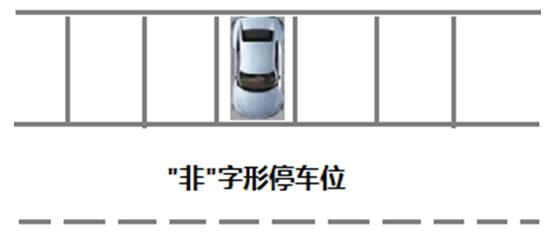
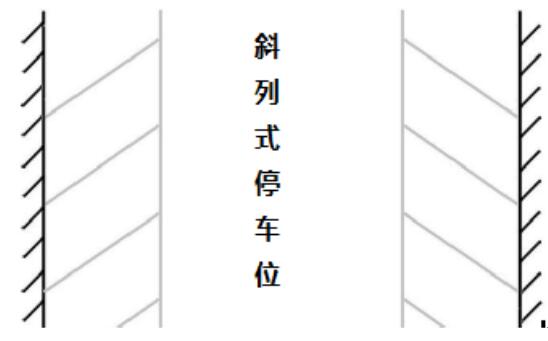
在高速公路服务区停车场对地磁传感器实际使用的测试中,在高速公路停车场“非”字形和斜列式停车位的特殊场景下,停靠车辆距离近,地磁感应器之间的干扰非常显著,检车的准确率难以达到要求。
4、其他的干扰
通常根据现场环境的差异,地磁检测准确率也是会下降的。不少公司对此也做过研究,现场环境下大体上对地磁会产生干扰的因素有:树枝树叶遮挡,通讯运营商的3G、4G无线信号,Wifi无线信号等等。想解决这些问题也并不是不可能。采用2.4GHz无线传输的设备需尽可能避免直对繁密的树枝树叶,不然通讯能力大大下降。目前来看,市场上的一些可靠的地磁产品已能有抗击3G、4G以及Wifi无线信号干扰的能力。
另外,同一城市、同一地点、同一路口,不同的是观测时间。大家都了解,同一地点标志着现场来自非地磁无线通讯的影响相同;而观测时间的不同,标志的则是车流量的不同,白天的车流量与凌晨两点之后的车流量完全存在差异。
结果很明显,不同时间段的检测准确率是不同的,车多时会出现过车不检或车离开后不恢复等现象。凌晨的检测准确率达到了100%,而白天的检测准确率却不容乐观。原因很简单,当车流量很大时,特别是有大型公交车或卡车经过时,车辆跟车过于紧密,完全阻挡了地磁与接收机之间的通讯。此状况随车道数增多而明显。也就是说,此无线传输波段很容易被汽车钢结构所吸收,从而很大程度上削弱了检测效果。
5、电池和内部电路板因素
实验室环境下,地磁电量可使用三年、五年、甚至更久。项目工程中现场安装后,由于频繁过车、频繁检测,从而电池电量不断损耗,使用寿命根本达不到理论效果。
还有一点,当地磁与中继器或接收机之间连接信号薄弱时,电池功耗也会增加。就像手机信号较弱的情况下,其辐射伤害会随之加强。这也是影响电池使用寿命的关键因素。
所有电子产品都一样,使用寿命与电路板的含金量成正比。地磁之所以能实现检车功能,也是通过其电路板上的各芯片功能实现的。若芯片含金量不足,出现损坏,也就会导致地磁使用寿命短暂。所以,电路板的原材料选择、焊接技术以及内部各接头的精准处理也至关重要。
实际应用中的地磁设备,使用三个月六个月之内完全没有问题,但时间久了,都会出现这样或那样的故障。市场上的供应商对地磁设备寿命的使用时效宣传有五年、八年、甚至十年之久,可是这些因素加在一起,可见地磁设备并没有想象中的那么优秀。

在市内能基本满足路测停车检测的地磁传感器,在高速公路服务区的检车方面,遇到了极大的挑战,但是,出路在哪里呢?这就是凡德软件基于改进的深度学习算法的图像识别检测技术。
三、不停车“过车拍”卡口系统方案
有人会想到在高速公路服务区出入口各装一套不停车“过车拍”卡口系统来实现停车诱导;这种不同车卡口系统对于停车诱导而言,显然是行不通的:
1、不停车模式
车辆进出频繁,流量极大是高速服务区的显著特点,日均500辆车以上,如果在高速服务区入口装上一个道闸起落杆,对进来和出去的车辆进行排队,每车一杆,显然极容易造成排队拥堵。
所以,卡口检车,对于高速服务区而言,可能的只能是不停车无道闸模式
2、误差的积累效应
为快捷、大流量、畅通地出入高速公路服务区,无法比较准确的一车一杆的道闸模式,而无道闸的不停车卡口模式,在前后跟车较近,以及大小车相间的情况下,会出现漏检的情况;这个误差只要达到1%,则一天就能有5辆车的漏检,一周下来后,基本系统就无法有效工作了。
3、无法定位车辆的无序停放问题
小车占用大车位、车辆不停在停车位等信息,卡口系统则无法知晓。
四、基于改进的深度学习算法的——凡德软件图像识别用于停车位车辆检测优势显著
在实际的停车中,车辆直接都会有不同程度或多或少的遮挡,传统的图像识别算法,对于这些遮挡等的情况识别效果不理想,因而难以达到停车诱导的要求水平。
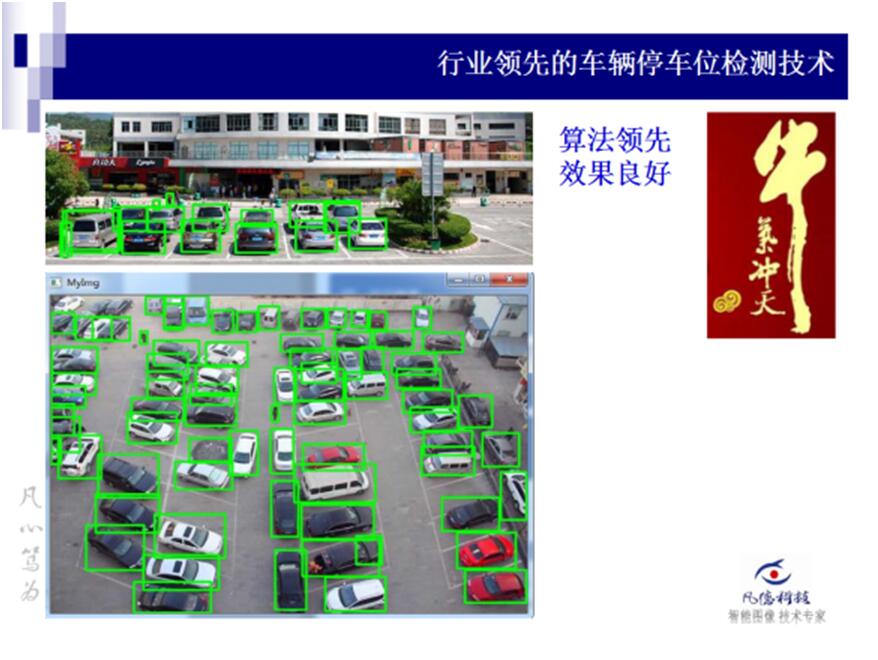
凡德软件使用独特的、改进的深度学习算法——车位检测黑科技,大幅超越传统的图像算法,大幅超过地磁传感器检测效果。
技术给行业带来革新和福利,由于凡德软件采用了独特的改进的深度学习算法,并采用球机的方式进行大面积停车数量检测管理,在实际运行的项目中,达到极佳的效果和良好的的性价比。
1、检测速度快
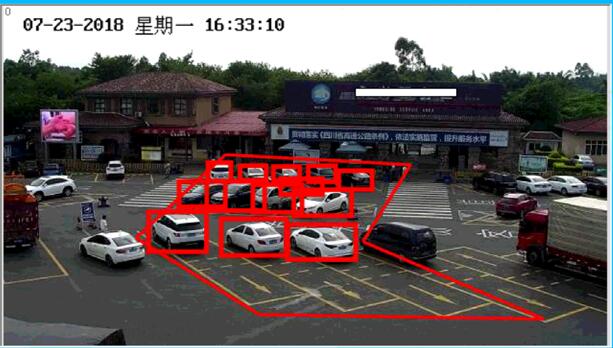
2、识别精准

3、多区域管理
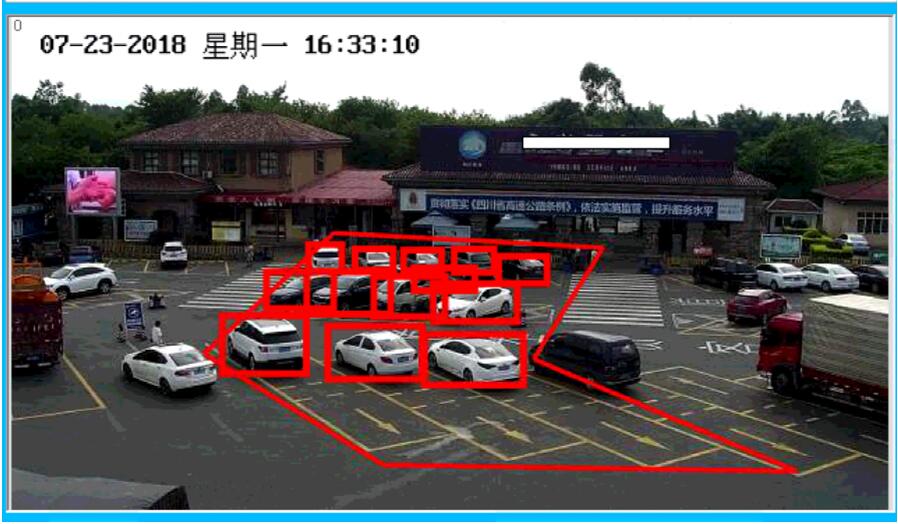
使用球机可以360°转动的特点,一个摄像机,可以同时检测多个区域;部署起来灵活方便。
4、对车辆进行分类识别
凡德软件图像识别能够对小车、大车、自行车、摩托车、行人等进行分类识别,便于根据停车位情况,分类提示、分类诱导。
5、识别不在停车位上的车辆
根据交通运输部对高速公路服务区服务质量检查的标准要求,对未在停车位的车辆,要技术提醒;本系统能实时识别不在停车位上的车辆情况,然后通过两种方式通知安保人员或者司机:
(1)后台系统提醒
后台系统能够发现和提醒不在停车位的车辆,即使提示;根据需要,可以在安保人员的手机APP上提示。
(2)高音号角
通过现场的高音号角,在非停车位停车行为发生时,立即提醒车主文明停车。
6、安装简单、快捷
因为算法的强大,对前端的设备和安装均无苛刻要求。
使用普通200像素球形摄像机即可,使用多种厂家的摄像机品牌。
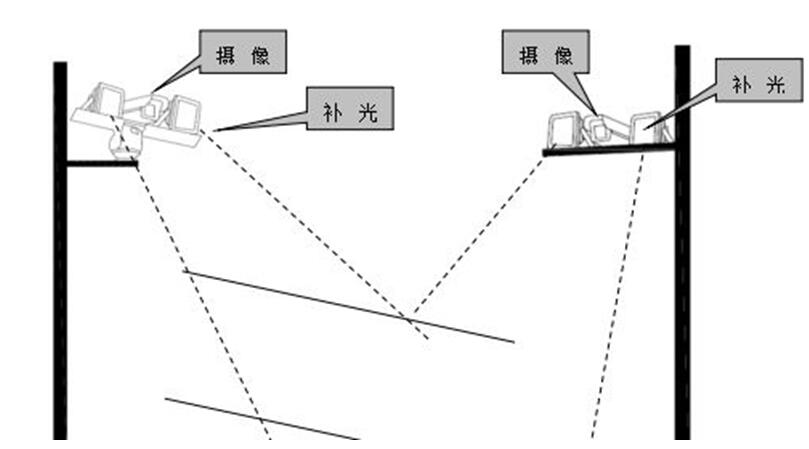
安装角度和高度尽量避免大车遮挡小车,或者在遮挡的情况下,在被遮挡的方向加装一台摄像机即可。
后台使用GPU图像运算服务器,服务器直接与情报板(LED)电子屏相连接。
无需在停车位上做任何施工。
(2)配置LED情报板显示
主流的LED情报板都支持WEB API的POST传输协议,系统支持简单配置传送结果,支持至少3级情报板的设置,对情报板的数量基本无限制;设置起来简单快捷。
传送的信息包括车位类型、车位总数量和车位剩余的空位等。
4、支持对停车状况的管理
对于跨多泊位、跨单泊位停车等,系统会进行识别和提示。
5、收费辅助:进场和离场的记录
对于非全封闭的地面、路侧停车泊位,系统还支持进场和离场时间的记录、进场和离场的记录,有图有真相,在收费发生争议的时候,提供进行佐证。
6、免费试用期和超高性价比
在凡德科技AI SAAS平台上注册,可获得30天的免费试用期,试用到期后,简单延期即可继续使用。
就是如此简单,摄像机、一套PC机上运行的软件系统,简单连接情报板即可,基于球型摄像机的停车诱导,就是如此高效和简单!